Business & Media:
This week, business worked on the impact presentation. Not only that, but we sorted out all of the important logistics for this year’s competitions. Other than that, business and media mainly helped mech work on the robot.
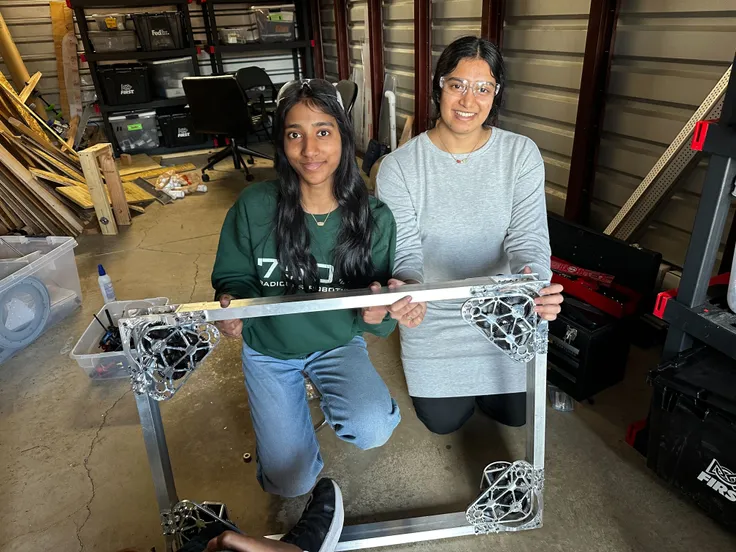
Mech:

This week, mech focused on building and designing the robot's physical components. We drilled holes for the elevator, assembled the first and second stages of the elevator, and worked on the carriage. We also completed the CAD of the elevator and finished the robot chassis intended for competitions. A lot of progress was made on the reef and elevator, and are almost done.
Programming:
public static Command fromSimplifiedSplinePoints(TrajectoryConstants constants, boolean followTrajectoryHeading,
Pose2d startingPose, Pose2d endingPose, Translation2d... midpoints) {
try {
Trajectory trajectory = TrajectoryGenerator.generateTrajectory(
startingPose,
Arrays.asList(midpoints),
endingPose,
new TrajectoryConfig(constants.maxPathSpeed(), constants.maxPathAcceleration()));
return new FollowTrajectory(trajectory, followTrajectoryHeading, constants);
} catch (Exception e) {
System.out.println("Unable to generate simplified spline trajectory");
System.out.println("This is often caused by listing the same point twice");
System.out.println(e);
return new InstantCommand();
}
}Programming tested the arm mechanism with the wooden chassis. However, the chain was skipping. We would have fixed it, but we do not have the proper chain tools. We moved our code for pathfinding over to the 2025 robot so we can set up autonomous routines as soon as the robot's construction is done. We also tried to link NetworkTables to Vision directly and tried using System ID to calculate the feed toward PID constants.