This CRESCENDO℠ presented by Haas season has come in full swing now that we have finished brainstorming, and all subteams are working hard to prepare for the competition!
Business
The business team this week has been busy at work creating this year’s business binder, updating it with all the outreach events we have done this year along with new team information. We also continued to work on Impact award essays and making the script for the presentation.
Programming
Swerve and PathPlanner:
In programming this week, we configured our swerve drive base for this season and used code from team 364 to help. We worked mainly on configuring the PathPlanner library so that we could quickly create new autonomous movement commands. Once finished, we tested more complicated paths to determine if there were any issues in our code, while also preparing us for the autonomous period in competition.

April Tags:
Something else programming has been working on this week is setting up the NVIDIA Jetson Nano to be used with vision processing. We are attempting to set up NVIDIA's Isaac ROS system to use their CUDA accelerated AprilTags detection programming so we can use the tags on the field to help with robot odometry to maintain accurate path following.
Mechanical
Intake:
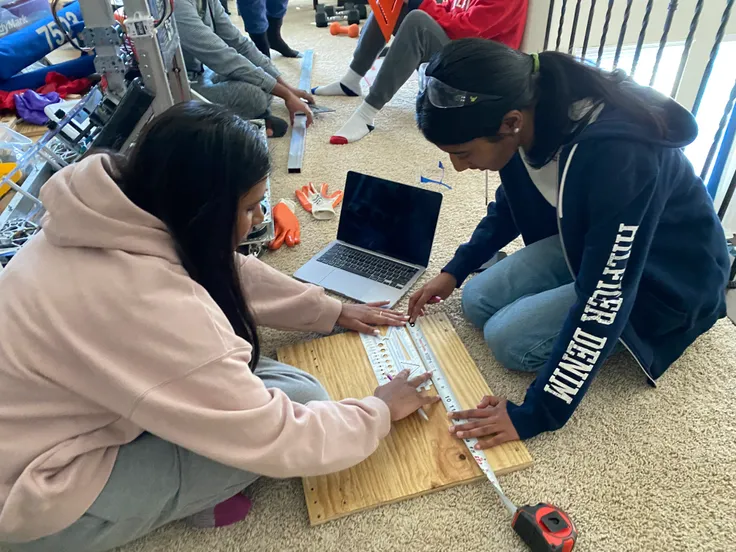
After rigorously brainstorming and using CAD to map out ideas in week one, we finally began creating prototypes of our intake and shooter for the notes. From this, our team members were able to see any parts of the intake they needed to improve on and begin reCADing to create new solutions for problems from testing.
We also implemented an extra modification for the shooter, a roller at the front to help with ground intake. While it was effective at what it was designed to do, we realized that the roller would impede us from scoring into the speaker. So we decided to move the rollers from the shooter to the chassis itself, making it a stationary, under- the-chassis intake. Before we jump into building this, we are going to CAD this out to make sure this idea works.
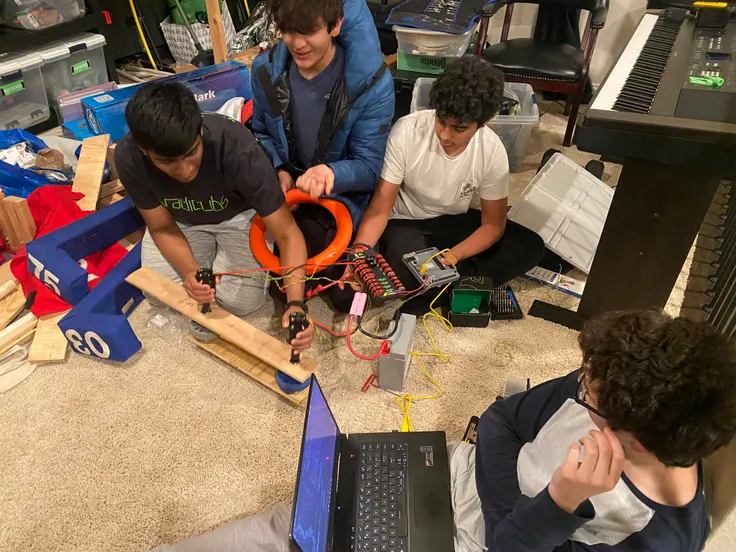
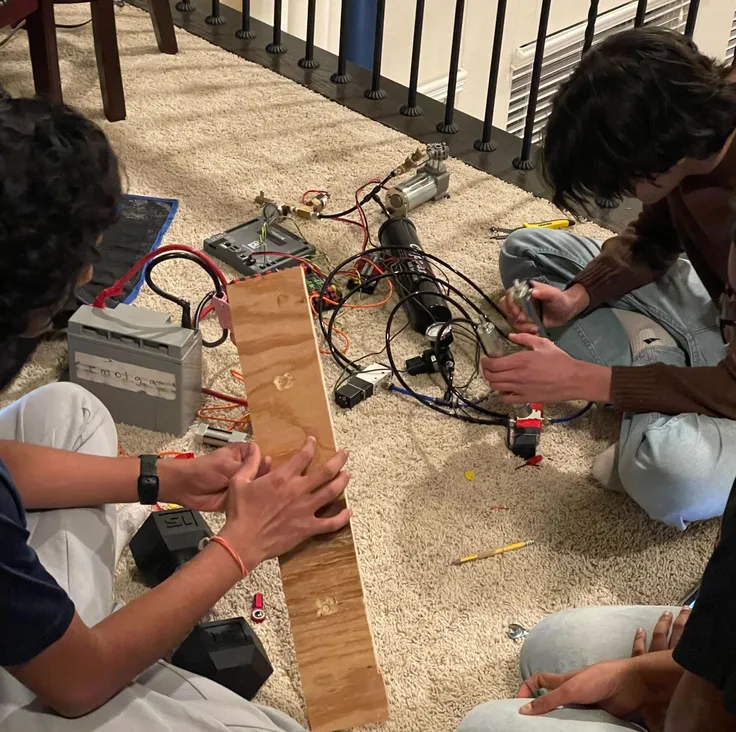
Pneumatics:
This week we started experimenting with pneumatics for the first time! The plan is to use it as a climber for the stage, but there is still a lot of testing to ensure this is a reliable method to lift the robot. We have already experimented with the current cylinders we have but found out that we don’t have cylinders that are strong enough to lift the whole robot. So we plan to buy the ones that fit our requirements.