
The Radicubs made a lot of progress during week three of this build season, including finishing our initial prototype!
Mechanical:

This week, our mech team worked hard on finishing our first prototype! We used some spare wood, hex shafts, and flywheels to expand our shooter to include both sets of flywheels. While it worked fairly well, the front motors did not have much time to ramp up to speed before the note left the shooter, so the note did not shoot how we wanted it to. We are brainstorming more ideas on how to solve this problem, including turning the back wheels into an “index” so the note is not always in contact with the front wheels and extending the length.
For our intake, we have added a small roller to the front of the robot, and the shooter will descend below the chassis to pick up notes from the floor. This also worked pretty well, but the note got stuck on the bottom of the shooter. This issue may be resolved when we transition to a final design and use polycarbonate instead of 3/4" plywood
We finally had the chance to order the components for our climbing mechanism. We will be utilizing pneumatics for the first time in several years! We purchased pneumatic cylinders 1 and 1/2 inches in diameter to apply 200 lbs of retraction force on our robot to elevate it on the chains. We have not had the chance to test them yet, but we hope to try them out on an old robot this week!
Cad team:

The CAD team made minor adjustments to the robot design and started using the design measurements as a reference for our initial physical prototype. In addition, we simulated our pneumatics system to ensure the dimensions would allow our robot to climb the chain, and have enough force to do so.
Business:

This week, the business team carried on drafting the Impact essay for submission, scripting the Impact script for the presentation, and started working on the Impact video. The business team also helped the mech team format the engineering journal and continued the business binder. Additionally, the media subteam kept our Instagram and TikTok updated, increasing posting on both.
Programming:
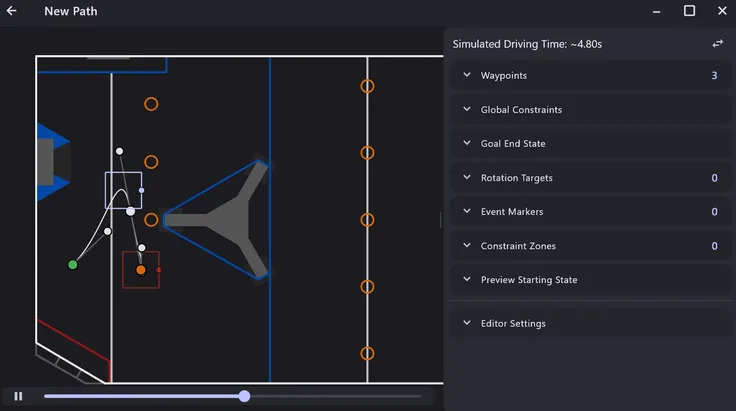
The programming team completed the installation and setup of PathPlanner last week, enabling us to start using premade paths and Pathfinder in our code. This will help our robot go from two different points and avoid obstacles our robot may encounter during autonomous.
Along with this, we’ve experimented with the automatic pathfinding feature of PathPlanner. This allows us to define a drivable area on the field, and specify any point in that area for the robot to automatically navigate to. In addition to avoiding static obstacles, this feature even allows the robot to avoid moving obstacles. For instance, if we had a way to track the other robots on the field, our robot would be able to automatically navigate around these moving targets.